組込み機器へのROS/ROS 2適用と商用化支援
- ROSとは
- ROS/ROS 2を組込みシステムに適用するメリット
- ROS/ROS 2を活用した効率的な自律制御システム開発ソリューション
- eSOLが提供するサービス
- 適用事例
- 開発実績
- 関連動画
- 関連資料
- 分散処理フレームワーク
単一プロセッサ構成から複数プロセッサ構成まで、スケーラブルにアプリケーションシステムを構築可能 - 豊富なライブラリ群
ロボティクス分野で生み出された認識アルゴリズムやナビゲーション機能など、豊富なロボティクス向けライブラリ群を利用可能 - 高機能な開発ツール
シミュレーション、経路計画、可視化、データロギングなどの高機能な開発ツールを利用可能 - 車載機器
- モビリティ機器
- 製造装置
- 医療機器
- ヘルスケア製品
ROSとは

ROS(Robot Operating System)は、オープンソース(OSS)のロボット用アプリケーションフレームワークです。高機能なロボット制御で求められる分散システムの構築に適した設計で、システム構成の変更を柔軟かつ容易に行えます。ROSはUNIX系OSのUbuntuを標準環境としており、ロボットの研究開発分野で世界的に広く使われています。

ROS 2は、ROSの主要コンセプトを引き継ぎながら、組込み機器を含むマルチプラットフォーム化やリアルタイム制御、耐障害性の向上、複数ロボット対応など、商用化・実用化に必要なコンセプトが追加されて開発が進んでいます。通信ミドルウェアには、軍用システム や宇宙・航空システム、金融システムなどでの採用実績を持つ、信頼性の高いDDS(Data Distribution Service)およびRTPS(Real-Time Publish-Subscribe)プロトコルが採用されています。
特長
ROS/ROS 2の適用が期待される市場
ページトップへ戻る
ROS/ROS 2を組込みシステムに適用するメリット
- 豊富なROS/ROS 2のソフトウェア資産を使って組込み製品の高機能化を実現
- 分散システムの利点を活かして複雑化する組込みシステムを効率的に開発
- ROS/ROS 2の適用範囲を組込み分野に広げて多種多様なロボット製品を実現
| ROS/ROS 2が提供する豊富な機能を活用し、様々な組込みシステムへのROS/ROS 2適用と商用化をeSOLは支援します。 |
ページトップへ戻る
ROS/ROS 2を活用した効率的な自律制御システム開発ソリューション
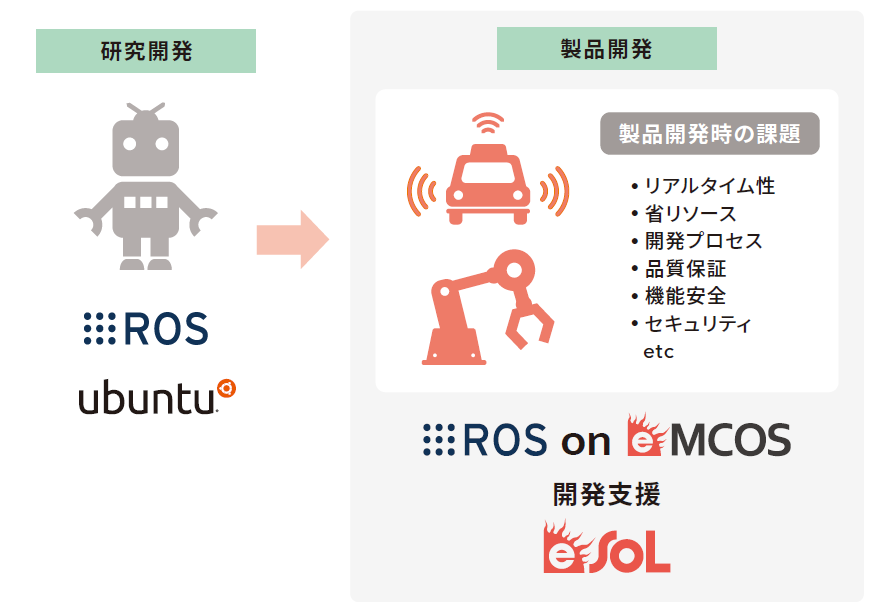
ROS/ROS 2に対応したスケーラブルな組込みプラットフォーム「ROS on eMCOS」を活用し、効率的な自律制御ロボットや自動運転システム開発の実現に加え、製品開発にも適用可能な組込みシステム向けROS実行環境をご提案します。

![]()
POSIX仕様準拠スケーラブルリアルタイムOS「eMCOS POSIX」を用いることで、製品開発にも適用可能な組込みシステム向けROS実行環境を実現
- 分散型マイクロカーネルアーキテクチャを採用し、シングルコアからマルチ・メニーコアプロセッサ、マルチチップまでスケーラブルにサポート
- ROS/ROS 2のビルドシステムを変更することなく、豊富なソフトウェア資産を組込みプロセッサで利用可能
- リアルタイムOS固有の機能を提供
- 軽量なリアルタイムスレッド
- 安全系システムと非安全系システムの分離
- ハードウェア構成に最適化したメッセージパッシング
- 車載システムなどの別システムとの連携
ページトップへ戻る
eSOLが提供する製品・サービス
豊富な経験と知見を活かしたROS/ROS 2エンジニアリングサービスや、自律分散協調システムに最適なリアルタイムOS「eMCOS」を中心とするソフトウェアプラットフォーム技術を提供することにより、品質確保や機能安全対応なども視野に入れた信頼性の高いロボットシステムの製品化を強力に支援します。
- ROS/ROS 2に関するエンジニアリングサービス
- ROS/ROS 2アプリケーション開発
- ROS/ROS 2と既存システムの統合(インテグレーション)
- ロボット制御用デバイスドライバ開発
- 市販ロボットを使ったSLAM等の試作開発
- 組込み用ROSの研究開発
- ROS/ROS 2などOSSを用いた開発プロセスのコンサルティング
など
- ROS/ROS 2の特長を生かしたアプリケーション用SDKの構築
- ROS/ROS 2との親和性の高いeMCOSをベースとするプラットフォームの提供
ページトップへ戻る
適用事例
ROS 2 on Renesas RX65N
ROS 2対応のGR-ROSEとAWSクラウドサービスを利用したロボット制御
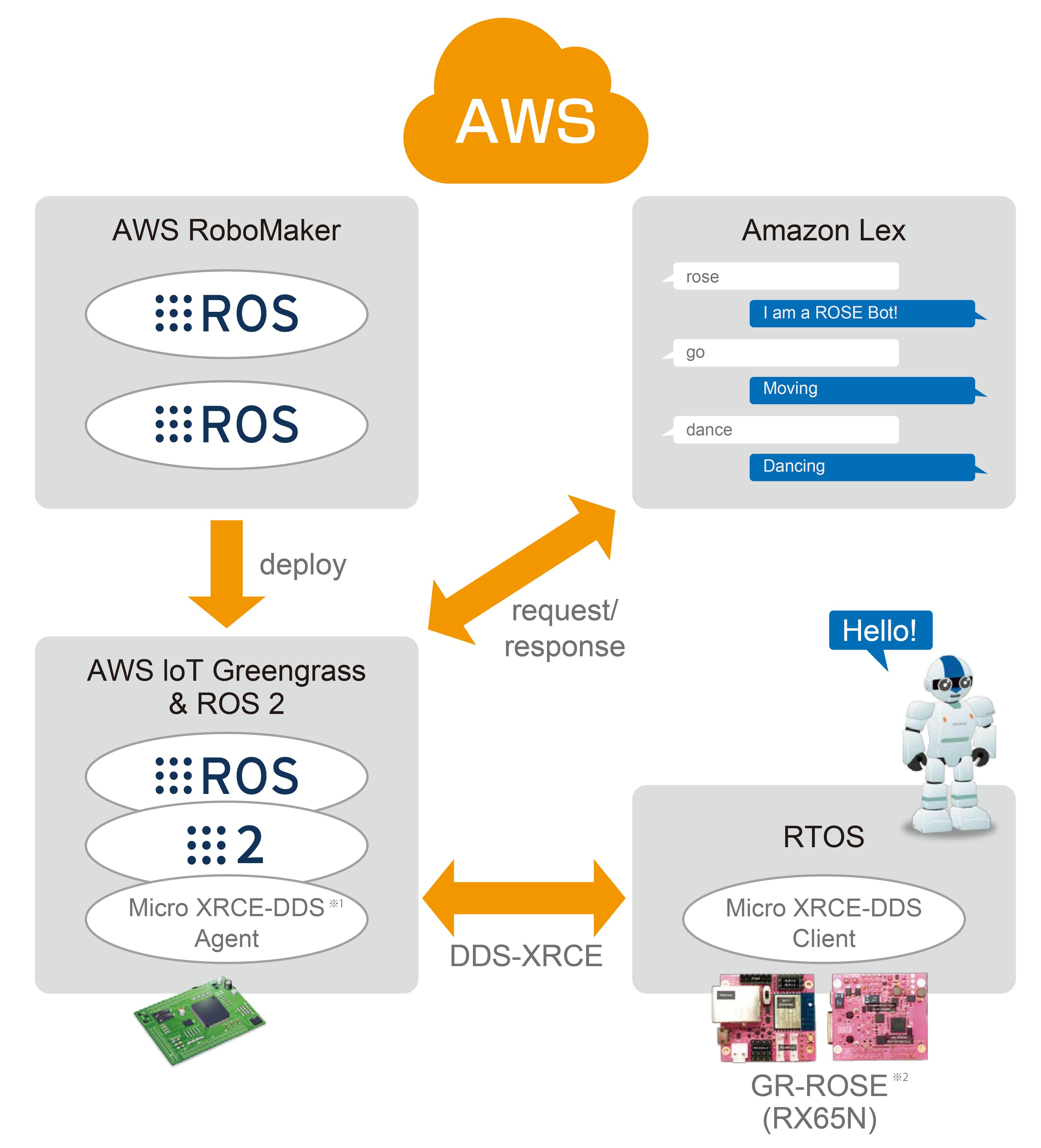
- Micro XRCE-DDS:eProsima社製 DDS-XRCE対応ソフトウェア
- GR-ROSE:「RX65N」搭載 コア社製開発ボード
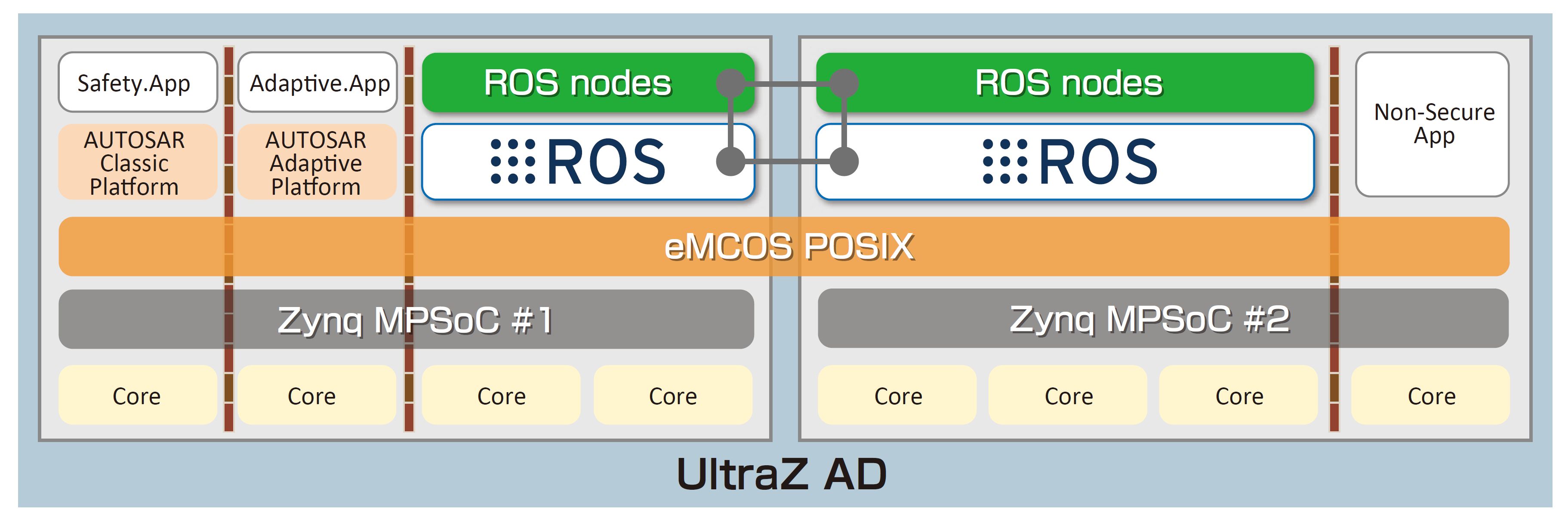
ROS on eMCOS×Zynq UltraScale+ MPSoC搭載 UltraZ AD
高度自動運転システムに最適なROS/ROS 2 をスケーラブルリアルタイムOS「eMCOS」が動作するUltraZ ADボードに実装。eMCOSにより信頼性の異なるアプリケーションを完全に分離したセキュア・セーフなシステムの構築を支援
ページトップへ戻る
開発実績
- マイコンノード開発(RX MCU, rosserial)
- パーソナルモビリティ開発(Navigation Stack)
- インフラ点検ロボット開発(OpenRAVE, rqt)
- 自律移動ロボット開発(Navigation Stack, Perception)
- 自動運転用Autoware環境構築(Camera Driver, Localization, Perception)
- センサデバイスのROS評価環境構築(3D LiDAR, Point Cloud, CAN)
- Windows PCとのブリッジ環境構築(MATLAB/Simulink, MoveIt! bridge)
Back to top
関連動画
|

関連資料

|

|



オンライン無料相談会もご利用ください。
Zoomなどのオンライン会議ツールで行える無料相談会を実施しています。弊社社員と時間を設けて会話しながら相談したい、という場合は、ぜひこちらをご活用ください。